Example of the system working with three microphones and one signal in a noise-free environment. Real DOA is shown with a green circle, at around 60 degrees.
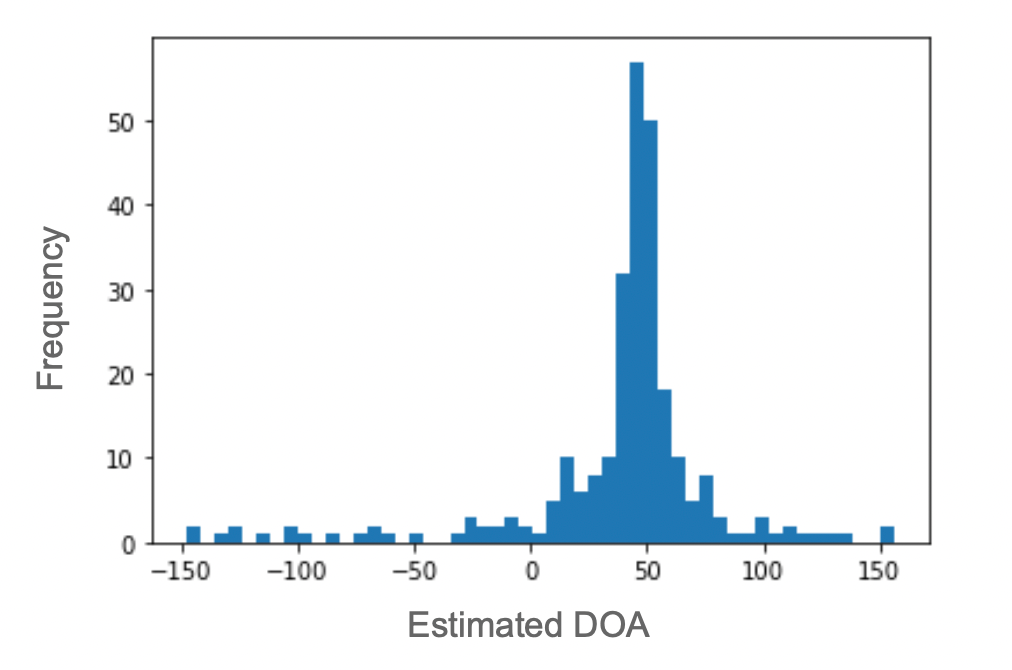
Histogram of predicted DOA. In most cases, it is remarkably near the real value.
Example of the system working with three microphones and one signal in a noisy and reverberant environment. Real DOA is shown with a green circle, at around 0 degrees.
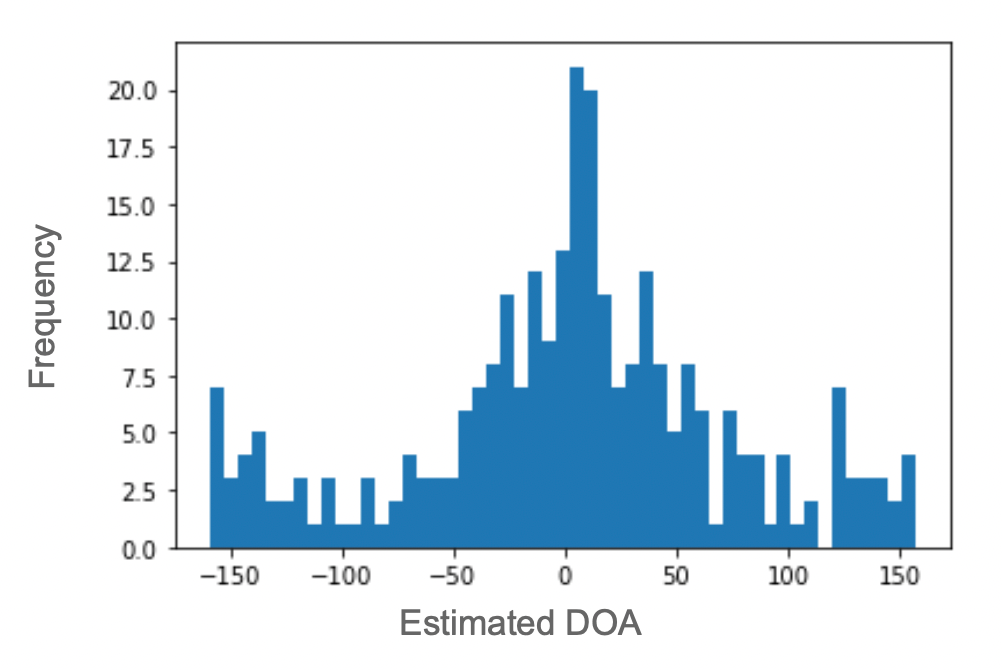
Histogram of predicted DOA. The most frequent predictions are still around the real value.
Example of the system working with three microphones and two signals in a noise-free environment. Real DOAs are shown with green circles, at around -30 and 90 degrees. As it can be seen, the system usually alternates between one of the two real DOAs for this recording.
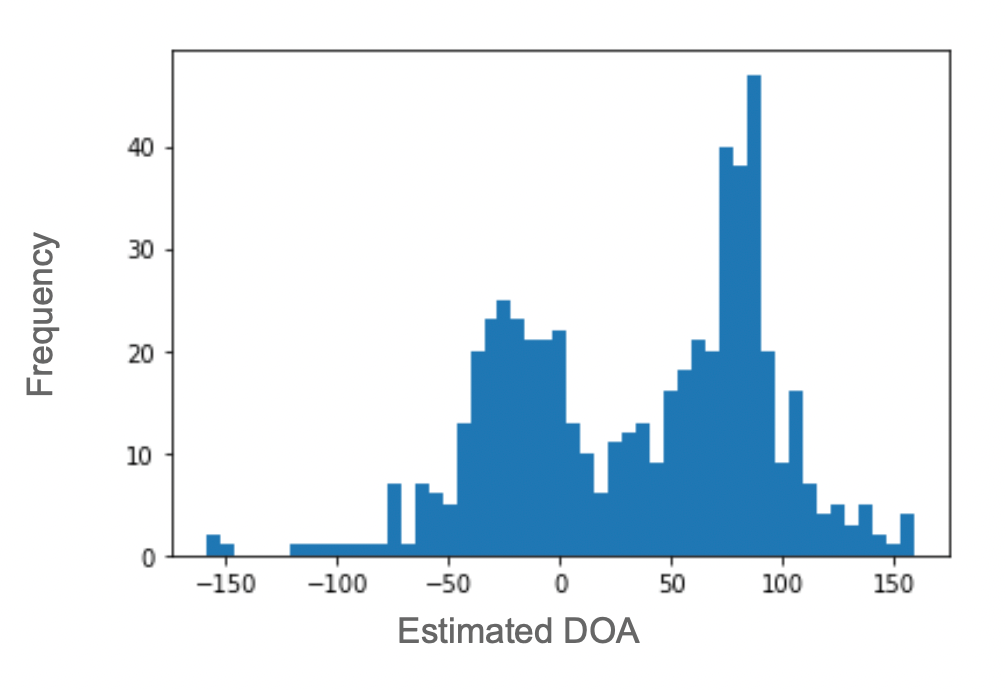
Histogram of predicted DOAs. The most frequent predictions are around the two real values.